This chapter was written by Ping He.
Learning Objectives
After reading this chapter, you should be able to:
-
Explain the roles and functionalities of the two main Python-layer files: pyDAFoam.py and mphys_dafoam.py.
-
Trace the detailed call flow of a typical DAFoam case, from the main entry-point class DAFoamBuilder through the primal and adjoint solver function calls.
-
Describe how mphys_dafoam.py sets up a typical aerodynamic shape optimization N2, including the mesh, design variables (dvs), geometry, solver group, and objective/constraint functions.
Overview
The Python layer provides the user-facing API for DAFoam and integrates with MPhys for multidisciplinary optimization. For developers who need to wrap DAFoam into their framework or conduct high-level developments, the Python layer is the main entry point. The Python layer consists of two main modules:
- pyDAFoam.py - Core solver interface with DAOPTION and PYDAFOAM classes (see below)
- mphys_dafoam.py - MPhys/OpenMDAO component definitions and coupling
The Python layer communicates with the C++ layer through the Cython interface (pyDASolvers.so), enabling efficient data transfer and control flow between high-level Python optimization frameworks and low-level CFD computations.
pyDAFoam.py - Core Solver Interface
DAOPTION Class
The DAOPTION class defines all configuration options for DAFoam solvers. Options are categorized into three levels:
Basic Options - Used for every solver and case:
solverName: Solver type (e.g., DASimpleFoam, DARhoSimpleFoam, DAPisoFoam)primalMinResTol: Convergence tolerance for primal solver (default: 1.0e-8)primalBC: Boundary conditions that override the “0” folderprimalInitCondition: Initial field valuesfunction: Objective and constraint function definitionsinputInfo: Input variable definitions (design variables, boundary conditions, etc.)
Intermediate Options - Used for special situations:
primalVarBounds: Bounds to prevent solution divergenceadjEqnSolMethod: Adjoint equation solution methodnormalizeStates: State normalization for better conditioning
Advanced Options - Case-specific performance tuning:
maxResConLv4JacPCMat: Preconditioner memory reductionadjPartDerivFDStep: Finite difference step for partial derivativesadjPCLag: Preconditioner lag for adjoint solver
PYDAFOAM Class
The PYDAFOAM class is the main interface to initialize and manage DAFoam C++ solvers. PYDAFOAM will be called/used in the DAFoam builder defined in mphys_dafoam.py (see the next section). PYDAFOAM’s Key responsibilities:
Initialization:
- Creates DASolver C++ object through Cython interface
- Initializes OpenFOAM mesh and flow fields by calling initSolver()
- Configures input/output variables based on
inputInfoandoutputInfo - setup connectivity and interfaces with pyGeo, IDWarp, etc.
Key Methods:
__call__(): Solves the primal flow equationssetMesh(): Associates an IDWarp mesh object for geometry changesgetOption()/setOption(): Get/set DAOption parameters
mphys_dafoam.py - MPhys Integration
The mphys_dafoam.py module implements the MPhys Builder API and defines OpenMDAO components that wrap DAFoam’s flow solver capabilities, enabling seamless integration with multidisciplinary optimization frameworks and standardizing the interface for coupling with other physics solvers (structural, thermal, etc.). One of the main purposes of mphys_dafoam.py is to setup the MDO problem, illustrated as an OpenMDAO N2 diagram below. In the following, we will elaborate on how mphys_dafoam.py setups such an N2 diagram.
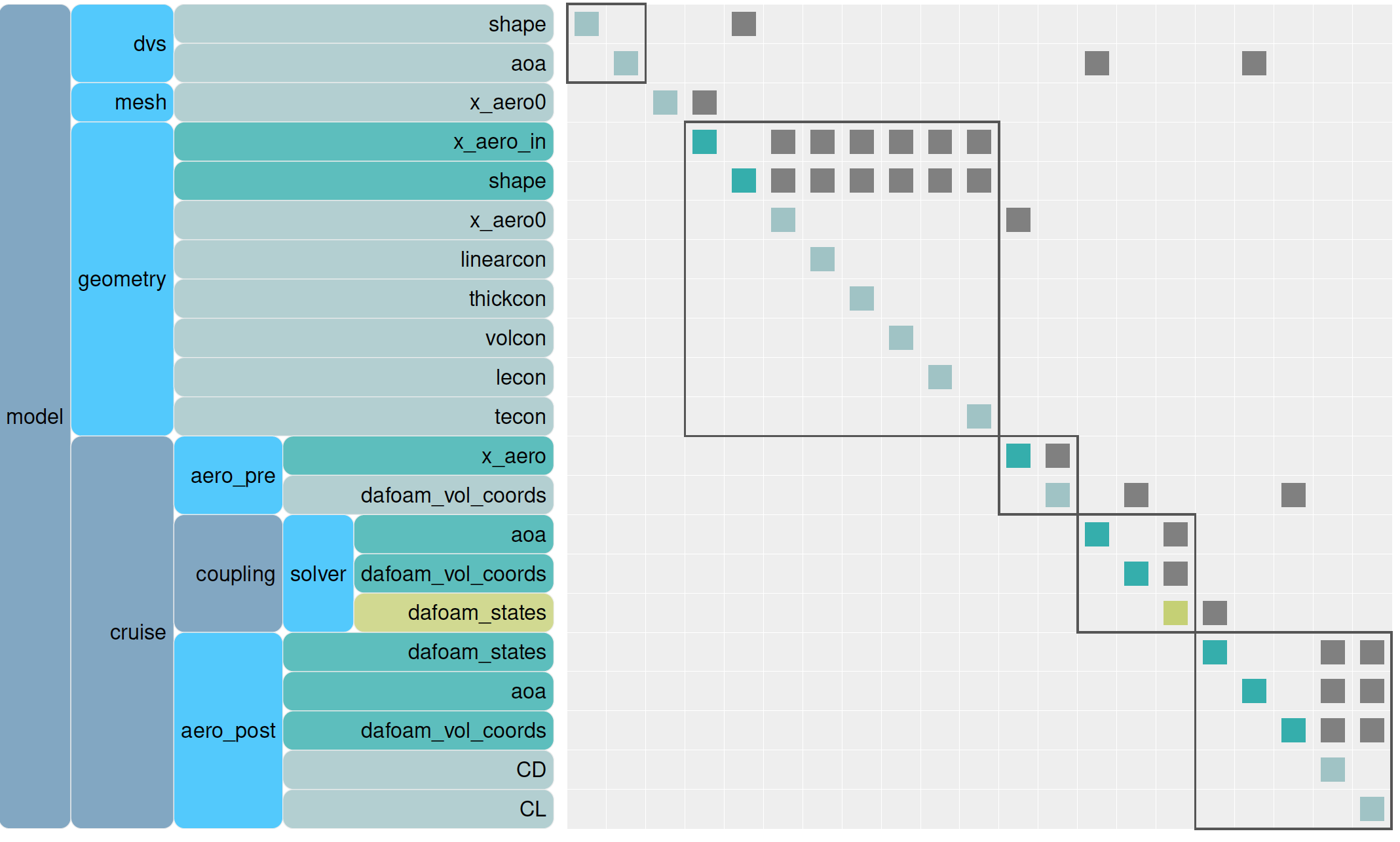
Figure 1: N2 diagram for a typical DAFoam aerodynamic optimization case.
DAFoamBuilder Class
DAFoamBuilder is the main entry point for using DAFoam in optimization workflows. It implements the MPhys Builder API to create and connect DAFoam components. In a typical runScript.py, the builder is instantiated and added to the MPhys multipoint group:
# Example from runScript.py
dafoam_builder = DAFoamBuilder(
options=daOptions, # daOptions is a dict defined in runScript.py
mesh_options=meshOptions, # meshOptions is a dict defined in runScript.py
scenario="aerodynamic"
)
dafoam_builder.initialize(self.comm)
Here DAFoamBuilder is defined in mphys_dafoam.py:21-64:
DAFoamBuilder(
options, # DAFoam options (daOption dict)
mesh_options=None, # IDWarp mesh warping options
scenario="aerodynamic", # "aerodynamic", "aerostructural", or "aerothermal"
run_directory="" # Directory to run the case
)
The scenario parameter configures coupling behavior:
"aerodynamic": Standard aerodynamic analysis (no coupling)"aerostructural": Enables structural coupling with force transfer"aerothermal": Enables thermal coupling with heat transfer
In the following, we elaborate on the methods and members defined in the DAFoamBuilder class.
Builder Initialization (mphys_dafoam.py:67-78):
The initialize() method creates the PYDAFOAM solver instance:
self.DASolver = PYDAFOAM(options=self.options, comm=comm)
if self.mesh_options is not None:
mesh = USMesh(options=self.mesh_options, comm=comm)
self.DASolver.setMesh(mesh) # add the design surface family group
This line call the PYDAFOAM class defined in pyDAFoam.py to initialize all OpenFOAM flow fields and meshes. NOTE: in PYDAFOAM, we will call the C++ layer library to initialize OpenFOAM (e.g., createMesh, createTime, createFields). If mesh_options is provided, it also creates an IDWarp mesh object and associates it with the solver.
Overview of Key Builder Methods:
The following are the key builder methods. They will NOT be directly used in DAFoam. Instead, these methods will be used in Mphys to set up the MDO problem. Each of this method will call key DAFoam components defined in mphys_dafoam.py. We will elaborate on these DAFoam components in the next subsection.
get_solver()(mphys_dafoam.py:80-82)- Returns the DASolver object
- Used by RLT (Radial, Linear, Tangent) transfer schemes in MDO
get_coupling_group_subsystem()(mphys_dafoam.py:85-93)- Creates and returns a
DAFoamGroupcontaining:- DAFoamSolver (primal and adjoint solution)
- DAFoamWarper (mesh deformation, if enabled)
- MDO coupling components (forces for aero-structural, thermal for aero-thermal, etc.)
- Creates and returns a
get_mesh_coordinate_subsystem()(mphys_dafoam.py:95-98)- Returns
DAFoamMeshcomponent - Outputs design surface coordinates as initial geometry
- Returns
get_pre_coupling_subsystem()(mphys_dafoam.py:100-107)- Returns
DAFoamPrecouplingGroup - Handles geometry design variable changes (e.g., twist, shape changes)
- Contains DAFoamWarper for pre-coupling mesh deformation
- Returns
get_post_coupling_subsystem()(mphys_dafoam.py:109-110)- Returns
DAFoamPostcouplingGroup - Contains
DAFoamFunctionscomponent for computing objectives/constraints
- Returns
DAFoam Component Classes
DAFoamGroup
Purpose: DAFoamGroup contains the main solver and optional coupling components. It does not do the actual computation, it just group certain components together to facilitate MDO.
Structure (mphys_dafoam.py:125-181):
- deformer: DAFoamWarper component (if
use_warper=True) - solver: DAFoamSolver component (always included)
- thermal: DAFoamThermal component (if
thermal_coupling=True) - forcecoupling: DAFoamForces component (if
struct_coupling=True)
The group automatically promotes inputs/outputs based on coupling configuration. The following figure shows the N2 diagram for the DAFoamGroup for the aerodynamic, aerothermal, and aerostructural scenarios.
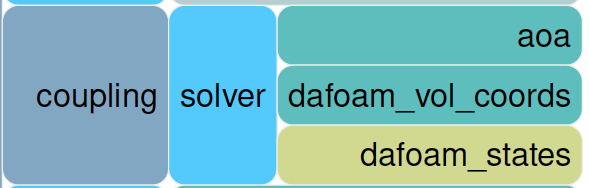
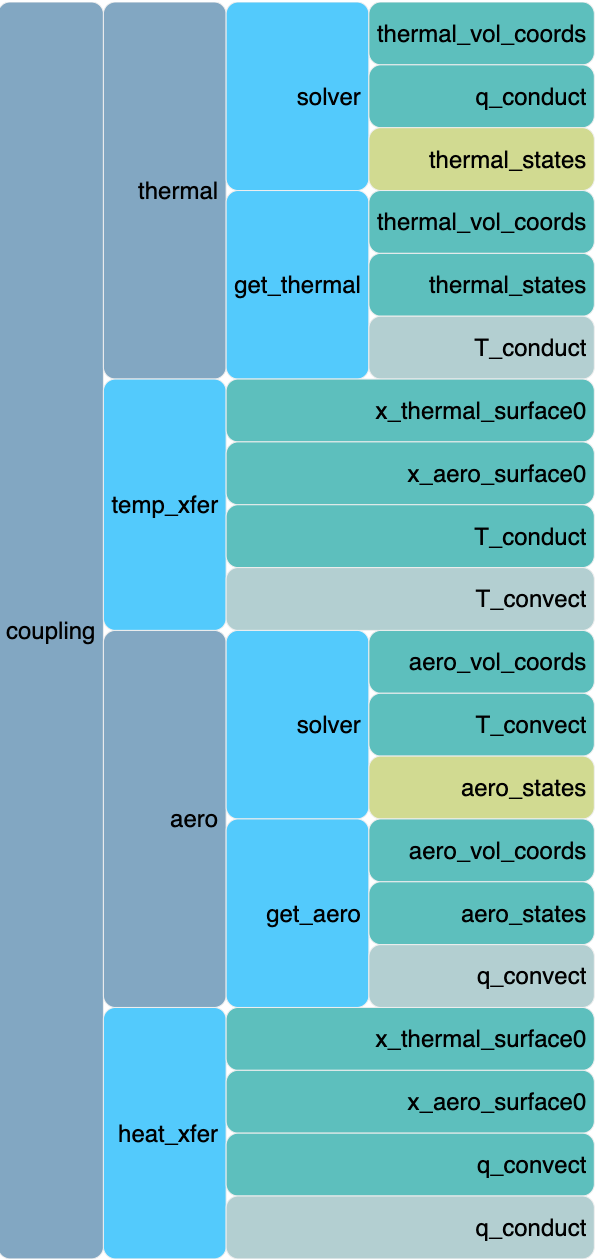
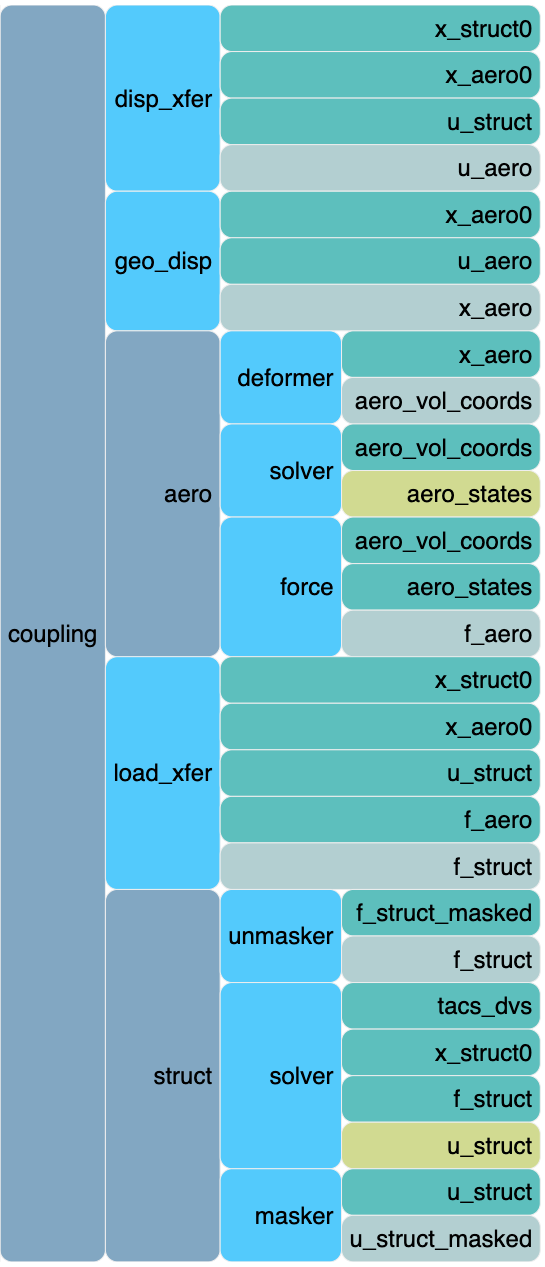
Figure 2: N2 diagram for the DAFoamGroup: Left: Aero-only, Mid: Aero-thermal, Right: Aero-Struct.
DAFoamSolver
Purpose: An ImplicitComponent that solves primal nonlinear equations and adjoint linear systems (mphys_dafoam.py:232-605). This component does the most critical calculation!
Key Methods:
setup(): Declares inputs (frominputInfo) and outputs (fromoutputInfo)solve_nonlinear(): Solves primal equations to find w such that R(w, x) = 0linearize(): Assembles explicit Jacobian matrices (dR/dw, dR/dx), NOTE: this method is not currently used in DAFoam; DAFoam uses Jacobian-free adjoint.apply_linear(): compute the matrix vector products for states and volume mesh coordinates, i.e., [dR/dW]^T * psi, [dR/dXv]^T * psisolve_linear(): Solves adjoint equations [dR/dw]^T * psi = [dF/dw]^T
Inputs (defined by inputInfo in daOption):
- Design variables (shape, angle of attack, flow conditions, etc.)
- Volume coordinates (e.g.,
aero_vol_coords) if mesh warping is enabled
Outputs (defined by outputInfo in daOption):
- State variables (aero_states for coupling with other solvers)
- Function values (for optimization)
A typical DAFoamSolver component (solver) can be seen in the Fig. 1 above.
Primal and Adjoint Solution Pipeline:
The DAFoamSolver orchestrates the flow and adjoint computations through OpenMDAO’s implicit component interface:
Primal Pipeline (Forward Pass):
setup(): Declares input/output variables for the solver- OpenMDAO calls DAFoamSolver’s
solve_nonlinear()method:- Calls
DASolver()(PYDAFOAM object) to solve primal equations - The PYDAFOAM object’s internal
__call__method calls C++ DASolver via Cython to execute the flow solver (e.g., DASimpleFoam) - Returns converged state variables
aero_statessatisfying residual:R = 0
- Calls
Adjoint Pipeline (Reverse Pass for Sensitivity Analysis):
- OpenMDAO enters reverse mode
- DAFoamFunctions:
- Computes partial derivatives
dF/dwanddF/dx - This is done by calling the
compute_jacvec_product()method in DAFoamFunctions
- Computes partial derivatives
solve_linear():- Solves the adjoint equation:
[dR/dw]^T * psi = [dF/dw]^T - Calls
solveLinearEqn()to solve the adjoint system - Returns adjoint variables
psi
- Solves the adjoint equation:
apply_linear():- Computes matrix-vector products:
[dR/dw]^T * psiand[dR/dx]^T * psi - apply_linear calls C++ routine
calcJacTVecProductdefined inpyDASolvers.soto compute these products without explicitly forming Jacobian matrices
- Computes matrix-vector products:
- Compute total derivatives: Once
psiis available, the total derivatives are computed as:total = dF/dx - [dR/dx]^T * psi.
Example Flow for an Optimization Step:
Optimizer
↓
OpenMDAO Problem.compute_totals()
↓
[Forward Pass] DAFoamSolver.solve_nonlinear() → PYDAFOAM() → C++ DASolver (primal flow solve)
↓
[Reverse Pass]
- DAFoamFunctions.compute_jacvec_product() → compute dF/dx and dF/dw
- DAFoamSolver.solve_linear() → [dR/dw]^T * psi = [dF/dw]^T → C++ adjoint solve for psi
- DAFoamSolver.apply_linear() → compute [dR/dx]^T * psi
- Compute total deriv → dF/dx - [dR/dx]^T * psi
↓
Optimizer receives total derivatives to update the design variables
This design provides:
- Efficiency: Jacobian-free adjoint avoids storing large matrices
- Accuracy: Automatic differentiation through C++ ensures consistent derivatives
- Modularity: Each component computes only its local derivatives
DAFoamWarper
Purpose: An ExplicitComponent that performs volume mesh deformation using IDWarp (mphys_dafoam.py:797-853).
Functionality:
- Takes surface coordinates (
x_aero) as input - Outputs deformed volume mesh coordinates (
aero_vol_coords) - Used for geometry-related design variables and aero-structural coupling
DAFoamWarper is called by these two components mentioned above:
- DAFoamPrecouplingGroup: Deforms mesh based on geometry DVs before primal solve. See the
aero_precomponent in Fig. 1. - DAFoamGroup: Deforms mesh inside coupling loop (aerostructural/aerothermal). See the
deformercomponent in Fig. 2 right.
DAFoamFunctions
Purpose: An ExplicitComponent that computes objective and constraint function values (mphys_dafoam.py:680-795).
Inputs:
- States (aero_states from DAFoamSolver): Flow solution variables
- Volume coordinates (if mesh warping is enabled): Deformed mesh
- Other design variables defined in
inputInfo
Outputs:
- Function values defined in
daOption["function"](e.g., CD, CL, totalPressure, etc.)
Key Methods:
compute(): Evaluates functions defined indaOption["function"]compute_jacvec_product(): Computes function derivatives (dF/dx, dF/dw)
Examples of Functions:
- Forces: CD (drag), CL (lift), CMX/CMY/CMZ (moments)
- Thermodynamic: totalPressure, totalTemperature, massFlowRate
- Geometric: volume, area, location
- Custom: user-defined functions via DAFunction classes
A typical DAFoamFunctions component (aero_post) can be seen in the Fig. 1 above.
DAFoamForces
Purpose: An ExplicitComponent that extracts surface forces for aerostructural coupling (mphys_dafoam.py:997-1098).
Inputs:
- States (aero_states): Flow solution variables
- Volume coordinates (aero_vol_coords): Deformed mesh
Outputs:
f_aero: Surface nodal forces for structural solver
Derivatives:
df_aero/daero_states: Force sensitivity to flow statesdf_aero/daero_vol_coords: Force sensitivity to mesh coordinates
A typical DAFoamForces component (forces) can be seen in the Fig. 2 right.
DAFoamThermal
Purpose: An ExplicitComponent that extracts surface thermal coupling vars for aerothermal coupling (mphys_dafoam.py:855-945).
Inputs:
- States (aero_states): Flow solution variables
- Volume coordinates (aero_vol_coords): Deformed mesh
Outputs:
T_conductorq_convect: Thermal coupling variables, could be either the near wall temperature or heat transfer parameters.
Functionality:
- Computes surface heat flux from flow solution
- Transfers thermal loads to structural thermal solver
- Similar structure to DAFoamForces but for thermal quantities
DAFoamMesh
Purpose: An ExplicitComponent that provides initial surface mesh coordinates (mphys_dafoam.py:607-678). Note: this component does not have any inputs. In other words, this component will never change the initial geometry.
Output: x_aero0 - Initial aerodynamic surface coordinates before any deformation
Geometry Parameterization
Geometry parameterization is handled outside the DAFoam components and is defined in the runScript.py script. The process involves three key steps:
Geometry Definition (runScript.py)
In the user’s runScript.py, the geometry is parameterized using pyGeo’s OM_DVGEOCOMP interface. For example:
# Add the geometry component with FFD parameterization
self.add_subsystem("geometry", OM_DVGEOCOMP(file="FFD/wingFFD.xyz", type="ffd"))
# The following two calls connect surface coords between mesh-geo and geo-scenario. Check Fig. 1 above
self.connect("mesh.x_aero0", "geometry.x_aero_in")
self.connect("geometry.x_aero0", "scenario1.x_aero")
The geometry component takes the initial surface coordinates (x_aero0) from DAFoamMesh and outputs the deformed coordinates (x_aero0) based on design variable changes (e.g., FFD control points, shape functions, etc.). OM_DVGEOCOMP is defined in in the pyGeo repo: pygeo/mphys/mphys_pygeo.py.
Design Variables (dvs) Component Setup
Design variables are added to the problem via the dvs (design variable system) component, which is an IndepVarComp that serves as the top-level source for all design variables. Again dvs has no inputs.
# From runScript.py
self.add_subsystem("dvs", om.IndepVarComp(), promotes=["*"])
self.dvs.add_output("shape", val=np.array([0] * len(shapes)))
self.dvs.add_output("patchV", val=np.array([U0, aoa0]))
# other connections calls
The dvs component is promoted to the top level (via promotes=["*"]), making its outputs directly available to all downstream components (geometry, scenario, etc.). This allows the optimizer to directly manipulate design variables without intermediate connections.
Mesh Deformation Pipeline
The mesh deformation process follows this pipeline:
- Design Variables (DVS component): Specify shape, FFD control points, twist angle, etc.
- Geometry Component (pyGeo/OM_DVGEOCOMP): Deforms the surface mesh based on design variables
- Warper (DAFoamWarper): Uses IDWarp to propagate surface deformations to the volume mesh
- DAFoam Solver (DAFoamSolver): Receives deformed volume mesh coordinates (
aero_vol_coords) as input
This separation keeps geometry parameterization flexible and independent from the flow solver, allowing users to easily swap between different parameterization strategies (FFD, CST, spline-based, etc.) without modifying DAFoam code.
Key Takeaways
- DAFoamBuilder is the entry point - it creates and configures all components
- DAFoamSolver is an implicit component - it solves both primal and adjoint equations
- Component modularity - Each component has a single responsibility (solver, warper, functions, coupling)
- Automatic differentiation - Partial derivatives are computed automatically through C++ layer
- MPhys integration - Standard builder API enables easy integration with MDO frameworks
- Flexible coupling - Supports aerodynamic, aerostructural, and aerothermal scenarios